STM32 L130 Differential Smart Car
Type: ROS-130D
SKU: ROS-130D
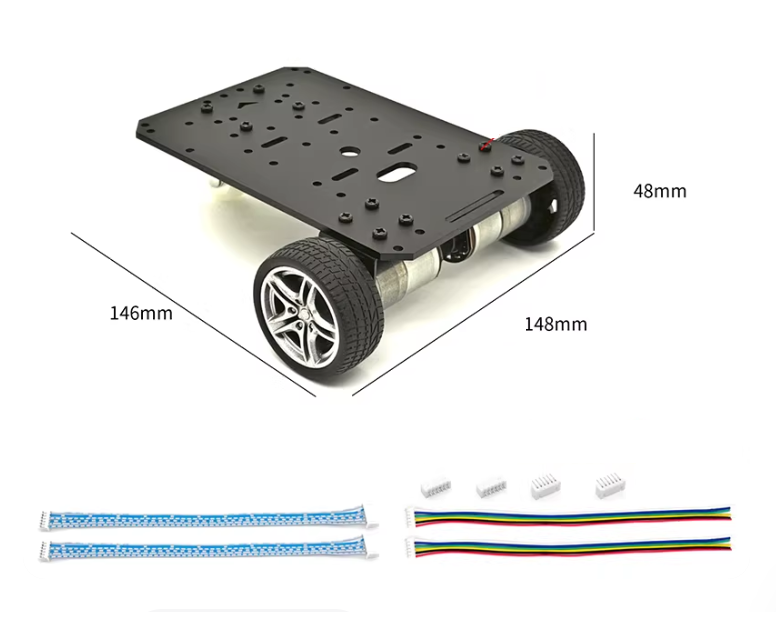
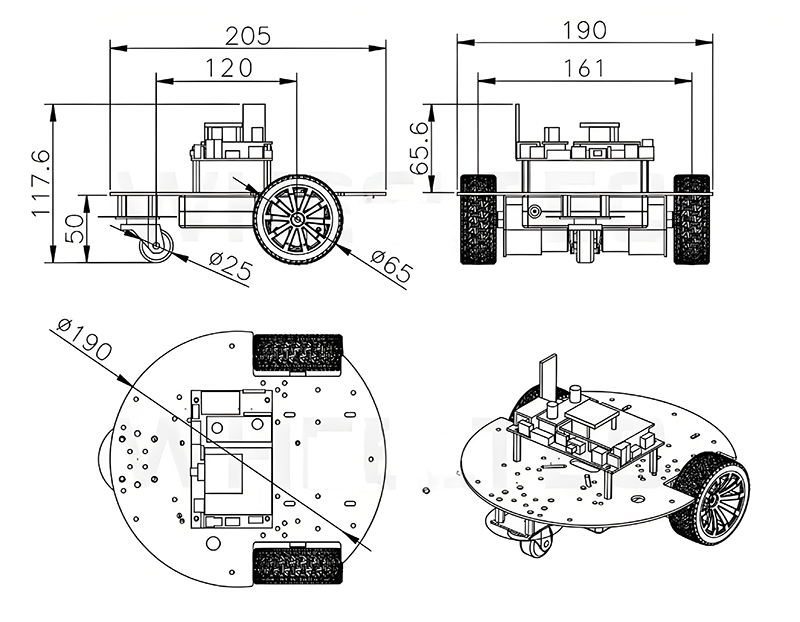
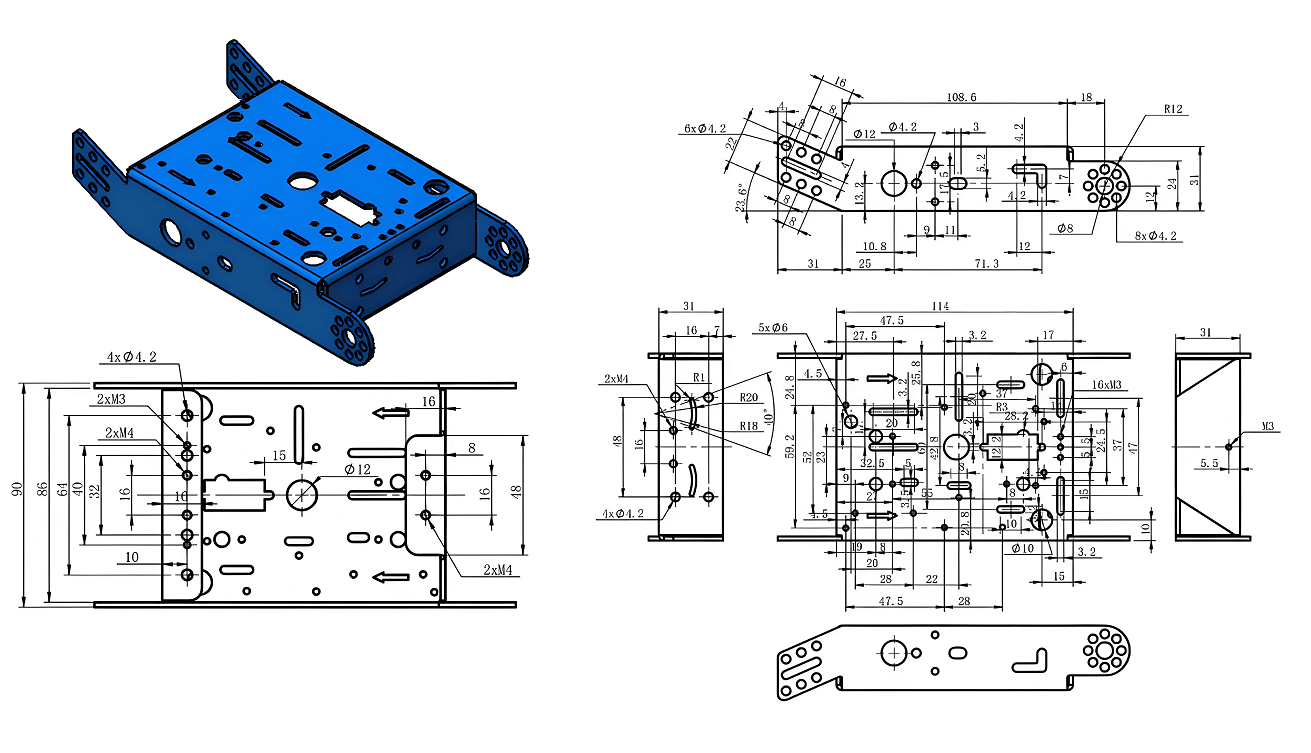
Robot car size: Finish 205X190X117.6mm
Weight: 0.8Kg
Rated: 2.5KG
Speed:1.0m/s
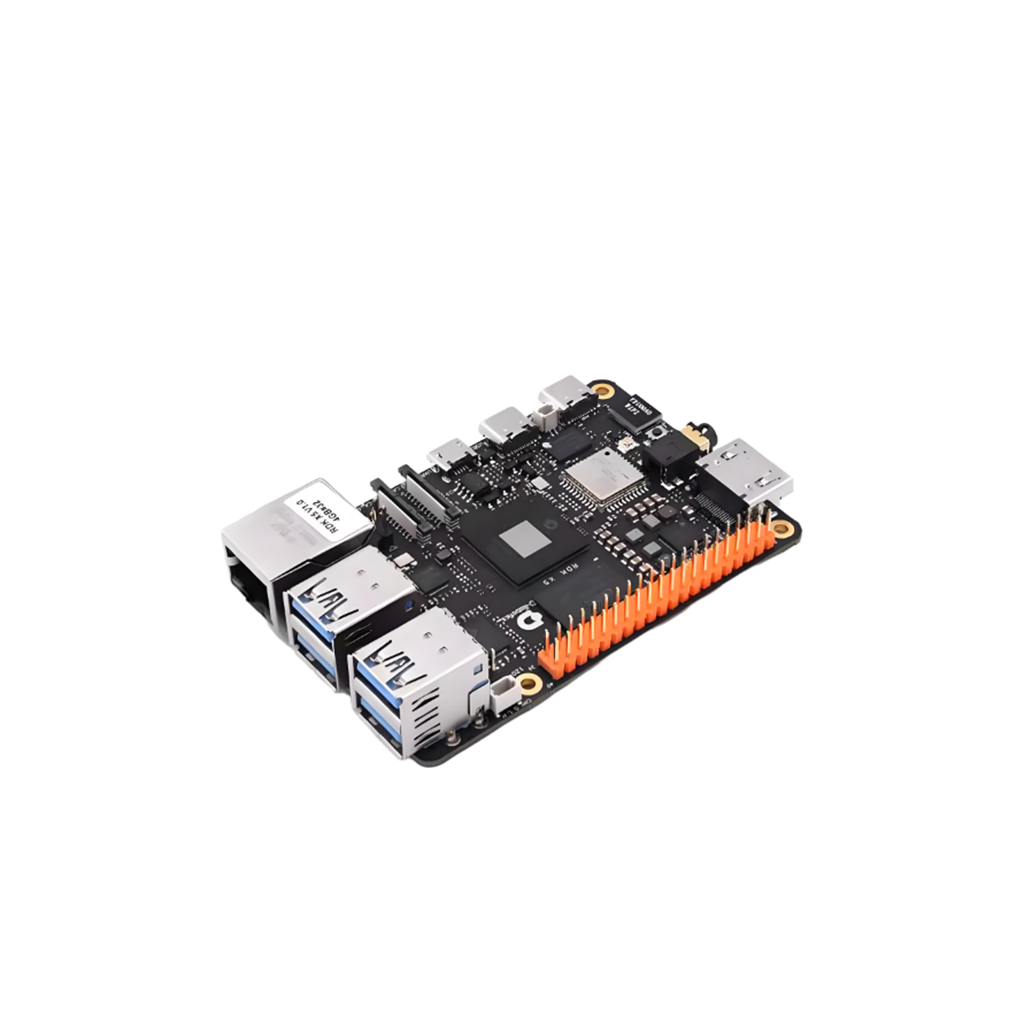
Control: STM32F103C8T6
Battery: 12V 18650 Lithium Battery (2600mAh)
Charger: Protected Lithium-Battery Charger
Motor Driver: TB6612 module
Available Serial Ports: 2
Encoder: Outputs 390 pulses per wheel revolution (tire can distinguish 0.23° rotation)
Control Method: PID Speed Closed-Loop Control (with source code, development notes, video tutorials)
Supported Control Modes:APP (joystick control, gravity-sensing control, button control), PS2 controller
Supported Line-Following Methods:Linear CCD, Electromagnetic (compatible with NXP intelligent vehicle signal generator)
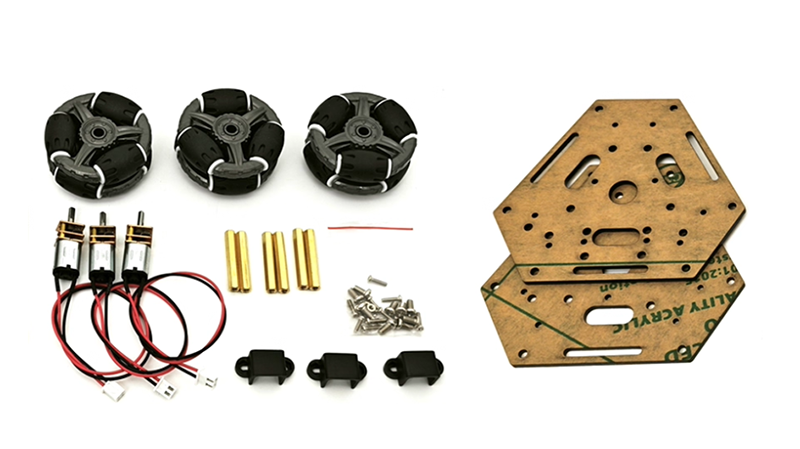
Gear Motor size: Gear Motor size: 37Dx53.4L mm
Motor Data: 12V 370rpm 28:1.
Stall Torque: 4.5Kg.cm 3.2A
Rated: 1.5Kg.cm,0.36A
Rated Speed: 300rpm
AB phase Hall Sensor Encoder:13ppr
Packing list:
1x differential Chassis Kit
1x Compatiable Arduino Modular Control Board
1xOLED (small)
1x battery with charger
1x USB deta cable
1x Bluetooth module
optional:
CCD Line Following, Electromagnetic Line Following, PS2 controller